Um dos grandes desafios do desmonte de rochas é a previsão de vibrações. Saber de antemão quais serão os níveis de vibração sem que se tenham dados prévios é um problema. Problema porque, literalmente, ataca-se essa questão com um enfoque estatístico, matemático. Ou pelo menos deveria ser este o caminho. Mas a maioria das pessoas aborda este assunto com muito mais especulação do que o bom senso apoiado no método cientifico pode suportar sem desabar. Espero que este pequeno texto possa ser um guia para ajudar a quem quer que precise iniciar um projeto de desmonte onde o controle de vibrações seja um fator crítico. Não será uma viagem profunda aos detalhes físicos e matemáticos que suportam a teoria aqui apresentada, mas, mesmo assim, servirá como um apoio prático e rápido para ajudar no projeto das cargas explosivas. Se você desejar um aprofundamento na teoria, diversas fontes estão presentes no texto para guiar você a uma leitura mais detalhada com um rigor maior. Também, ao final, está uma pequena bibliografia que poderá lhe ajudar.
Entendendo o que, exatamente, estamos medindo.
Não estamos medindo ondas de choque.
Certamente você já ouviu algo como “…as ondas de choque provenientes do desmonte de rochas com explosivos…”. O termo onda de choque é constantemente utilizado. Muitas pessoas acreditam que as oscilações que medimos com o uso do geofone foram causadas pela passagem de ondas de choque. Provavelmente não foram. De fato, próximo ao furo, na zona de fragmentação, existe a formação de ondas de choque. Uma das condições para que uma onda seja classificada como onda de choque é que sua velocidade de propagação deve ser maior que a velocidade de propagação do meio. Mas essa situação não se sustenta sem que a fonte mantenha um fornecimento contínuo de (muita) energia, ocasionando, desta forma, um estado de “choque”. A uma certa distância do desmonte, as ondas já se transformaram em ondas mecânicas simples e, a não ser que você tenha errado muito no dimensionamento do seu desmonte, a dezenas ou centenas de metros dos furos com explosivos, as oscilações são causadas por ondas comuns, no regime elástico do meio.
Quando um avião quebra a barreira do som emite continuamente ondas de choque justamente porque continua se movendo acima da velocidade do som. Mas isso custa energia, deve-se queimar combustível. Quando a coluna de explosivos termina de detonar, não existe mais uma fonte supersônica, não há como manter por uma distância muito grande ondas de choque no meio. Os pulsos que inicialmente começaram como ondas de choque já se atenuaram e agora se propagam com a velocidade de propagação do maciço. São apenas ondas mecânicas, comuns. Pode ser que estes pulsos carreguem grande quantidade de energia, mas ainda assim, não são ondas de choque.
Mas que fique bem claro: você pode “enviar” ondas de choque a dezenas de metros do desmonte, desde que forneça muita energia, mas essa não é a situação comum encontrada nos desmontes do dia a dia. E se você diz que captou oscilações que foram causadas por ondas de choque a centenas de metros do desmonte, a primeira pergunta que se deve fazer é se todas as construções ao redor sobreviveram.
A icônica figura presente no livro Rock Blasting and Explosives Engineering dos autores Per-Anders Persson, Roger Holmberg e Jaimin Lee, ilustra de maneira divertida o conceito de onda de choque.
Um bom texto que explica o que são ondas de choque (de verdade) é Rock Fracture and Blasting Theory and Applications , escrito pelo Dr. Zong-Xian Zhang. Neste livro você pode encontrar listados os fatores que caracterizam uma onda de choque:
Ondas de choque podem ser consideradas um tipo de ondas de tensão, e assim como estas, transportam energia e podem se propagar através de um meio sólido, liquido ou gasoso. Uma onda de choque possui as seguintes características:
- Possui um frente de onda quase vertical. O material por onde ela se propaga salta de maneira abrupta de um estado de não-choque a um estado de choque instantaneamente; isto é, através do choque existe sempre um aumento extremamente rápido da pressão, temperatura e densidade do meio.
- Ocorre, sempre, quando um material é tensionado muito além do seu limite elástico.
- Sua velocidade aumenta com um aumento da pressão e tensão.
- Há um aumento na entropia quando uma onda de choque é formada.
Existem claras diferenças entre ondas de choque e ondas de tensão elásticas:
- Ondas mecânicas comuns propagando-se em um meio elástico, não provocam tensões além do limite elástico (Não deformam permanentemente o material).
- A velocidade de uma onda elástica é constante, mesmo que a mesma possua uma frente de onda vertical.
- Não ocorre uma mudança na entropia quando uma onda elástica é formada.
Zong-Xian Zhang
Rock Fracture and Blasting
Theory and Applications
Lá no local onde você instalou o seu geofone, todos os fatores listado acima estão presentes? É provável que não. A não ser a alguns metros, ou centímetros, do furo estas condições acontecem. A menos, conforme dissemos acima, que você tenha um furo carregado com tamanha carga explosiva que possa gerar, ou melhor dizendo, manter ondas de choque a dezenas de metros.
Perceba que nas definições do Dr. Zhang a velocidade da onda de choque aumenta se você aumenta a pressão, ou seja, uma vez que estamos transmitindo acima da velocidade característica do meio, teoricamente, podemos elevar a velocidade da onda o quanto desejarmos (guardadas as devidas proporções relativísticas), basta apenas fornecermos energia suficiente. Por outro lado, ondas elásticas irão se propagar com a velocidade do meio. Se você fornecer mais energia a este tipo de onda, ocasionará um aumento da amplitude de oscilação das partículas do meio, mas a velocidade de propagação continuará a mesma até que você forneça energia suficiente em um intervalo de tempo muito curto para atingir o que se chama de uma descontinuidade de salto. Neste ponto, foi tamanha a potência que você forneceu que o material colapsa, pois estamos muito acima do limite elástico. Conforme o Dr. Zhang salienta, existe um aumento da entropia quando se atinge o inicio da formação de uma onda de choque. Isso é característicos das compressões adiabáticas. Fornecemos energia interna ao meio de outra forma que não através de uma troca térmica, ou seja, aumentamos a energia interna das partículas sem que calor fosse adicionado; a enorme pressão aplicada ao meio que faz com que suas partículas oscilem com maiores amplitudes e isso, por definição, é um aumento de temperatura. E se agora temos mais energia no sistema e mantemos seu tamanho, isto é, não adicionamos partículas ou massa, então a multiplicidade dos macroestados aumenta devido a este excedente de energia que injetamos, aumentando a entropia do sistema. Todos estes detalhes são para te mostrar que ondas de choque e ondas mecânicas comuns que se propagam em rochas, como ondas P, S, Love e Rayleigh são fenômenos diferentes, completamente distintos.
Observe que na analise sismográfica de vibrações por explosivos, o tipo de onda que ocasiona as oscilações, em principio, não faz muita diferença. Não estamos procurando saber se foi uma onda P, S ou Love ou uma interação das suas reflexões e refrações que ocasionou as oscilações, estamos interessados nos detalhes do ponto de medição: amplitude, velocidade, espectro de frequência e outras variáveis relativas as oscilações daquele local específico de instalação do geofone.
Para os profissionais que atuam diariamente com explosivos e desmonte de rochas, o termo onda de choque no contexto da sismografia pode não levantar muita preocupação. Afinal, estamos acostumados a uma certa licença poética e elasticidade na definição de ondas de choque. Mas para pessoas que não estão imersas no campo do desmonte ou da sismografia, escutar algo do tipo “vamos medir as oscilações causadas pelas ondas de choque na sua residência” pode ser muito perturbador. Ondas de choque, inevitavelmente, modificam o meio por onde passam: podem colapsa-lo devido a transitarem fora do limite elástico; podem aumentar sua temperatura devido a compressão adiabática. Por isso nossa função, como projetistas de um bom desmonte, é garantir que as oscilações causadas nas estruturas a serem preservadas sejam geradas apenas por ondas mecânicas que solicitam o meio dentro do seu limite elástico.
Para finalizar esta seção, uma pequena reflexão. O termo “desmonte controlado” deve ser evitado, pois separa, a priori, as operações de detonação em dois tipos: controladas e não-controladas. Desmonte de rocha já pressupõe controle, seja onde for. Se a energia liberada não foi controlada, com ocorrência de flyrock, vibrações excessivas e um ruído desconfortável, então a operação de detonação levada a cabo não foi um desmonte de rocha, talvez esteja mais para uma explosão. Da mesma forma, o uso do termo “ondas de choque” no contexto da sismografia deve ser usado com cautela. Se você vai medir oscilações causadas por ondas de choque a dezenas ou centenas de metros da detonação, então sua operação de detonação está com sérios problemas e o projeto deve ser repensado. Sendo você um profissional da área, cuidado com os termos que usa, eles carregam significados precisos.
Velocidade de partícula
Antes de saber qual é o significado de partícula e entender porque essa partícula tem uma velocidade, você precisa recordar que velocidade é sempre definida e medida em relação a algum referencial. A velocidade é uma grandeza vetorial.
Para lidar com vetores, a primeira coisa que precisamos é construir uma base para um sistema de coordenadas ortogonais. Com uma base ortogonal, poderemos conceituar alguns termos e tratar a velocidade de forma adequada. Na figura abaixo, temos 3 eixos que possuem entre si ângulos de 90 graus.
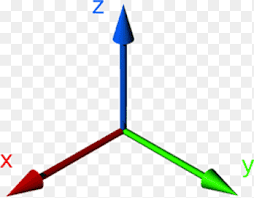
Na maioria de literatura geral sobre vetores o nome dos eixos é x,y,z , ou u,v,w. O pessoal da sismografia não gosta destes nomes, preferem substantivos mais significativos. Os mais comuns são Longitudinal, Transversal e Vertical.
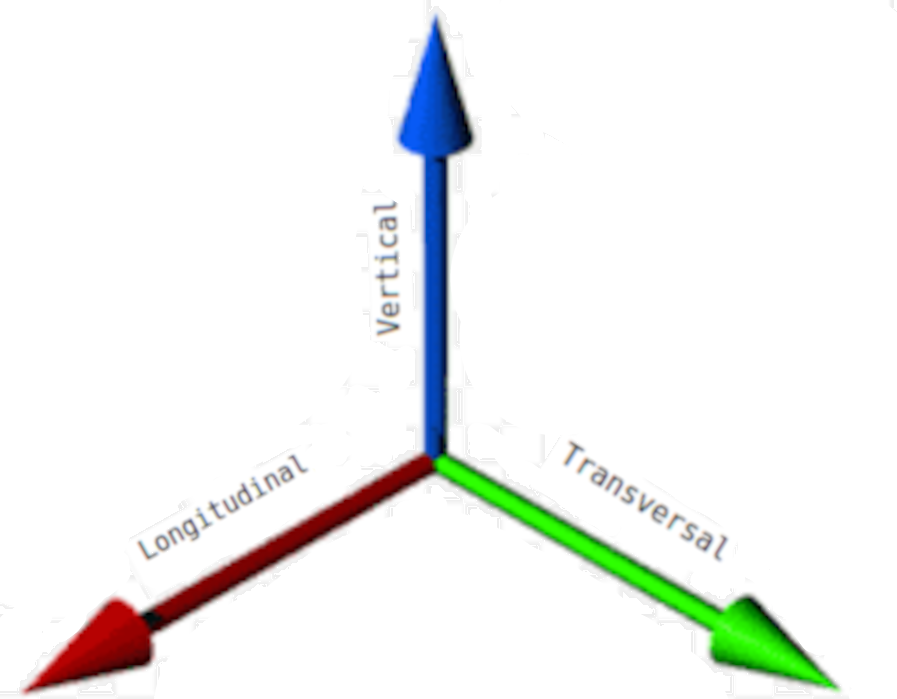
Alguns fabricantes de sismógrafos chamam o eixo Longitudinal de Radial. Mas isso não tem importância. Poderiam chamar de qualquer nome sem prejuízo algum as medições. Com base no nosso sistema de coordenadas temos então três componentes de velocidade: \(V_l, V_t, V_v\). Cada uma destas componentes preocupa-se apenas com o seu próprio eixo. Vejamos um pequeno exemplo bastante ilustrativo, que pode tornar mais palatável o que estou querendo dizer com tudo isso. Vamos observar apenas uma das componentes, a velocidade em relação ao eixo vertical. Para isso, vamos utilizar como exemplo um barco parado nas águas tranquilas de um lago.
Alguém na margem joga uma pedra muito grande no lago de forma que, após alguns instantes, o barco começa a oscilar devido a passagem da onda.
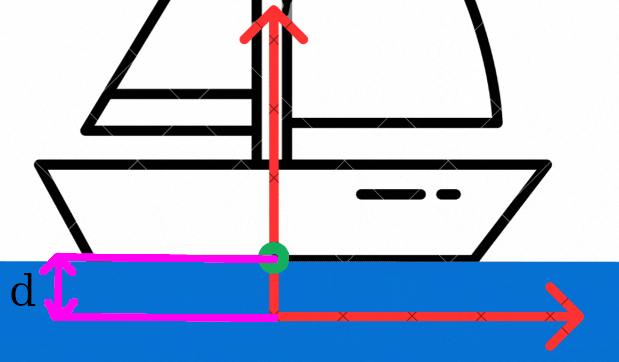
Estamos interessados apenas no movimento que o barco faz na direção vertical. Mas vertical em relação a o que? Para responder a isso, fixamos um eixo sobre o lago localizado mais ou menos sobre o centro do barco. Veja a figura abaixo.
Na figura acima preciso que você observe três coisas:
1 – A origem do nosso sistema de coordenadas permanece fixa em relação ao barco. Caso contrario, se ele estivesse fixo no barco, moveria-se junto com ele e a velocidade relativa a este sistema seria nula (convença-se disso).
2 – O ponto verde, que pertence ao barco, descreve um deslocamento exatamente sobre o eixo vertical. Este pequeno pontinho é o que poderíamos chamar de nossa partícula.
3 – A linha da superfície da água antes da passagem da onda, ou seja, quando o barquinho não está oscilando, coincide com a origem do nosso sistema de coordenadas. Esta linha vamos chamá-la de linha base, ou baseline se você preferir usar a nomenclatura comum presente nos sismogramas.
Agora vamos congelar a imagem em um instante onde nosso pontinho verde atinge sua altura máxima. Veja a figura abaixo.
Chamamos de “\( d \)” o deslocamento do barco desde a linha base. Se este deslocamento demorou um tempo \(t\) para ocorrer, então a velocidade do pontinho verde foi
\(V_v=\frac{d}{t}\)
E esta é a componente da velocidade no eixo vertical, \(V_v\), para este instante de medição, onde o barquinho atinge seu ponto máximo no eixo vertical.
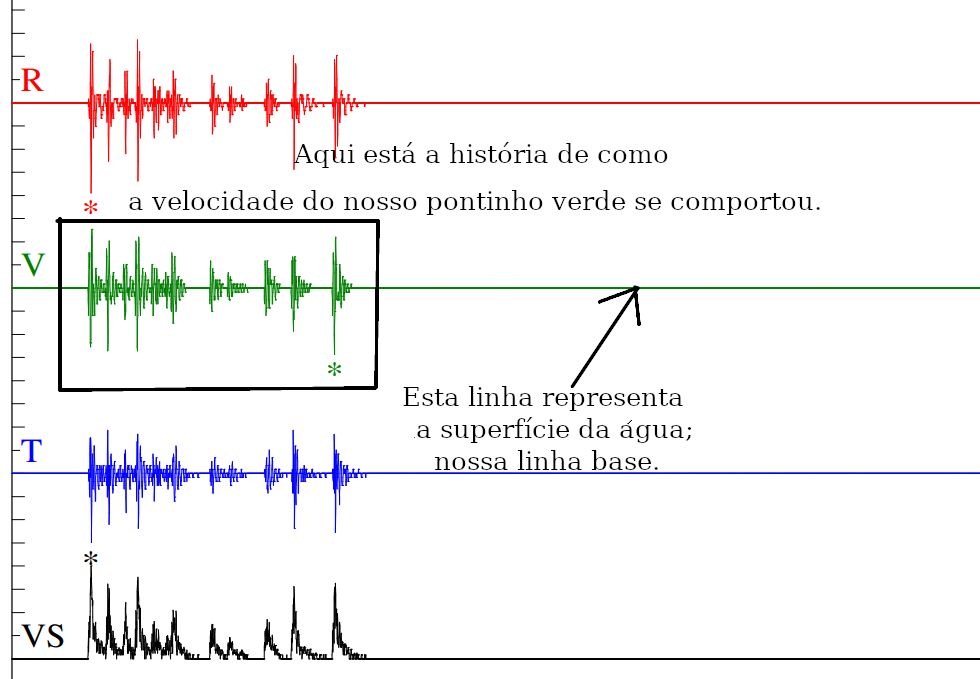
Mas nem sempre \(V_v\) será igual para todos os instantes de medição. A onda vai perdendo energia, por exemplo, ou alguém pode arremessar uma pedra maior ainda e fazer com que o barco oscile com um deslocamento maior, enfim, muitas coisas podem ocorrer que fazem com que a velocidade do nosso pontinho aumente ou diminua. Observe a figura abaixo, não a veja como um sismograma de um desmonte de rocha, mas como a história da velocidade do pontinho verde do nosso barquinho ao longo de um tempo de medição.
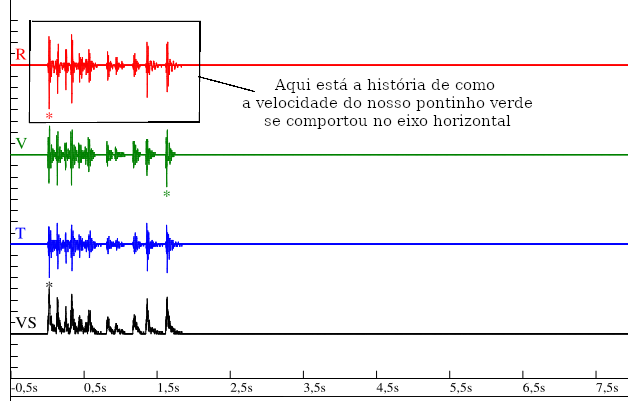
Vamos repetir o raciocínio para o deslocamento do barquinho agora no eixo horizontal. Observe a figura a seguir.
A figura abaixo representa as velocidades do nosso ponto verde na direção Radial.
Mas os movimentos do barco não ocorrem de maneira independente. Não existe uma sucessão de movimentos em cada eixo, isto é, primeiro oscila na vertical, depois no horizontal. Na verdade, ondas que ocorrem na água, particularmente nos oceanos, movem as partículas da superfície em trajetórias circulares. Este caminho orbital, como é conhecida esta trajetória, é representado na figura abaixo:
Se colocarmos nossa origem no centro da circunferência que representa a trajetória da partícula, podemos decompor o movimento nos eixos vertical e horizontal. O movimento no eixo vertical é representado pelo vetor verde sobre o eixo. O movimento horizontal, em amarelo.
Se a linha amarela passa à esquerda do eixo vertical, recebe valores negativos. Da mesma forma , quando a linha verde passa abaixo do eixo horizontal, recebe, também, valores negativos.
Agora, como um exemplo, registraremos a cada 1 segundo as medições de onde está nosso ponto (ou partícula, se assim você quiser chamar). Registramos tanto a posição relativa aos eixos bem como as velocidades do pontinho relativas a cada eixo. Veja a figura abaixo.
Este tipo de movimento composto ocorre nos meios sólidos também. Usei o exemplo das ondas na água para trazer algo que ocorre em uma escala que podemos observar apenas com os olhos. Mas em rocha, ou solo, também existem trajetórias de movimento das partículas que são provocadas por ondas. O geofone capta estes movimentos em eixos distintos e entrega para você, mastigadinho, pronto para seu uso. Você pode estudar mais sobre os tipos de ondas que ocorrem em rocha em materiais de estudo mais dedicados a geofísica ou sismologia. Aqui, nosso enfoque é na análise da oscilação local, isto é, queremos saber como, quando e por que nossas partículas se moveram de determinada maneira no ponto de instalação do geofone. Para isso, antes de tudo, estabelecer uma origem.
Sistema de coordenadas do geofone.
Deve ter ficado claro que podemos representar o movimento da partícula empregando um sistema de eixos ortogonais. Uma tabela parecida como esta da animação acima é o que um sismógrafo de engenharia te entrega.
Dentro de um geofone existem três LVT’s (Linear Velocity Transducer) dispostos perpendicularmente entre si. Veja as figuras abaixo.
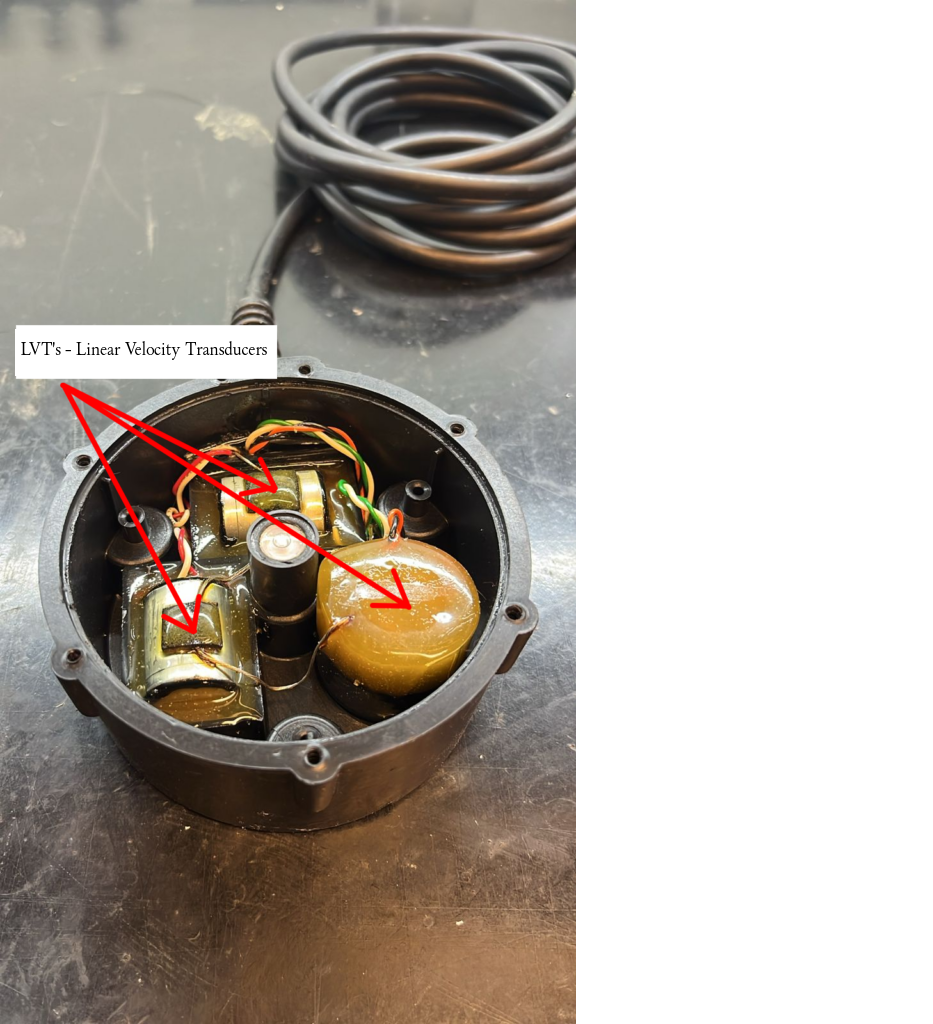
As velocidades que você mede na sismografia tem como origem do referencial o centro do geofone e os três sensores que medem o movimento estão dispostos perpendicularmente entre si.
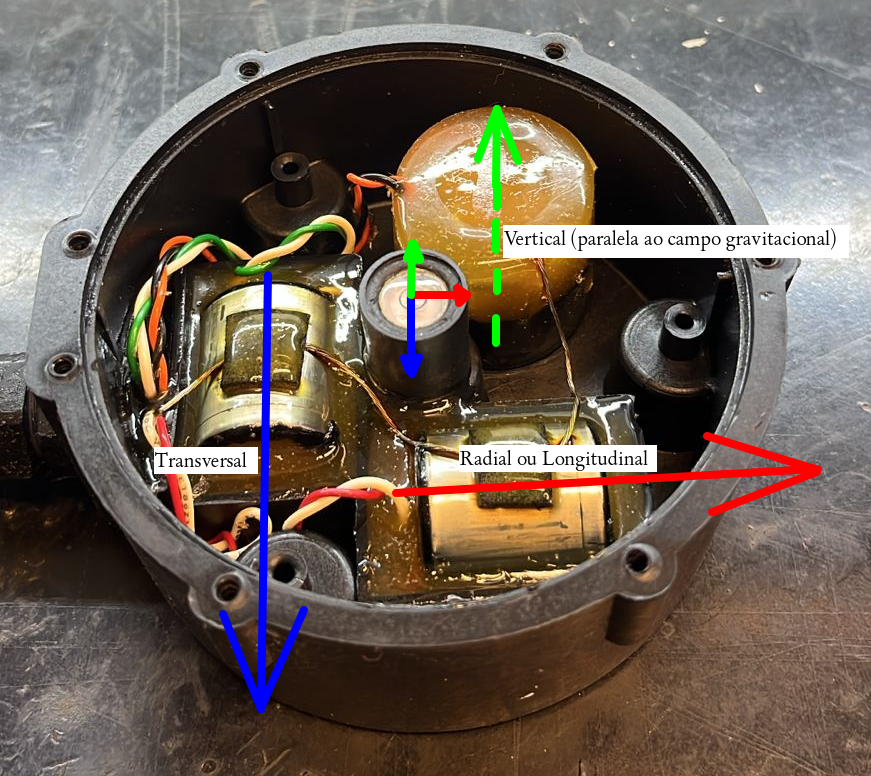
Perceba que não importa se você rotacionar o geofone no plano horizontal. Ele sempre manterá os eixos de medição ortogonais. Se você quer medir a oscilação em um sentido específico qualquer, deve alinhar um dos eixos, longitudinal ou transversal, paralelo a sua linha de medição. Alguns fabricantes imprimem setas direcionais sobre a superfície do geofone para indicar a direção dos eixos longitudinal (ou radial) e transversal.
É importante que o geofone seja mantido nivelado, desta forma o eixo vertical será paralelo ao campo gravitacional. Se por algum motivo você precisa realizar medições de maneira que o geofone não fique completamente nivelado, deve consultar o fabricante do seu aparelho para entender os limites deste tipo de medição e mesmo se é possível realizá-la. Se quiser, faça o download deste documento ISEE – Field practice guidelines for blasting seismographs. É um material bem completo sobre boas práticas de instalação de sismógrafos para uso em desmontes de rocha com explosivos.
O principio de funcionamento dos sensores de velocidade é baseado na corrente induzida em um condutor devido a variação de um campo magnético, a famosa Lei de Faraday. Os valores são extraídos através da captação do movimento relativo entre o ímã e as espiras de condutor. Veja a figura abaixo.
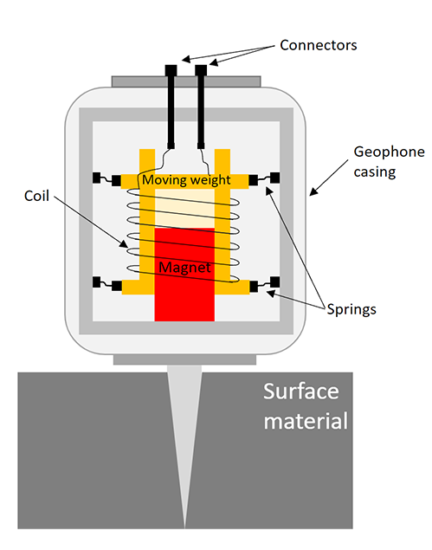
Este tipo de sensor tenta captar da maneira mais fiel possível a oscilação que o terreno realiza, produzindo uma corrente elétrica (quase) proporcional a velocidade do núcleo em relação as espiras. Mas isso não é tão simples como pode parecer. Se a amplitude for excessiva todo o conjunto ímã+espiras se moverá e teremos um referencial em movimento, como se nosso sistema de eixos fosse fixo no barco.
Esta configuração do sensor é um sistema massa-mola. Este tipo de sistema possui algumas características específicas que dependem das condições iniciais e de contorno. Uma delas é a frequência de ressonância. Um sistema como este pode ser modelado por uma equação diferencial na forma:
\(
m\ddot{y} + b\dot{y} + ky = F_{externa}
\)
As possíveis soluções desta equação apresentam características bem peculiares, existem algumas configurações das condições iniciais que fazem com que o sistema amplifique sua resposta para determinadas frequências. E isso acontece com o geofone também. Ele deve ter sua inércia calculada para que apresente uma resposta linear para uma determinada faixa de frequências, ou seja, para que não amplifique ou amorteça as oscilações. Existem diversas configurações de geofones, cada uma delas específica para determinadas frequências. A engenharia desenvolveu toda uma ciência e técnica aplicada para definir a melhor maneira de se construir um geofone para determinada aplicação. Por isso é importante que você use aparelhos especificamente construídos para a captação de oscilações provenientes de desmonte de rochas ou vibrações similares. Além disso, as vibrações devem ser captadas sobre o terreno onde esta a estrutura a ser preservada e não diretamente sobre a estrutura. Se você colocar o geofone sobre a estrutura estará captando a sua resposta às solicitações feitas pelas oscilações e não as vibrações que incidiram primariamente sobre ela. Seria algo como se você fizesse da estrutura parte constituinte do geofone. A maioria das normas de controle de vibração foi feita com base em estudos de oscilações captadas diretamente no terreno e suas conclusões e extrapolações não levaram em conta as particularidades das construções. Sim, existem correlações entre alguns espectros de frequências que levariam a um maior ou menor potencial de dano, mas estas frequências, também, estão associadas as oscilações incidentes e não ao espectro de frequências da resposta da estrutura.
Um livro já antigo, da década de 70, mas que explica bem os detalhes da ciência por detrás da captação sismográfica é Blast Vibration Analysis do geofísico G.A. Bollinger. Embora algumas informações já estejam desatualizadas é um bom guia inicial.
Velocidade resultante
A velocidade resultante é um termo que você vai ouvir bastante na sismografia. Ela é a soma vetorial das componentes. Isso significa que:
\(
V_R = \sqrt{V_L^2+V_T^2+V_V^2}
\)
Os termos são:
\(V_R\) – Velocidade resultante.
\(V_L\) – Velocidade medida pelo sensor no eixo longitudinal.
\(V_T\) – Velocidade medida pelo sensor no eixo transversal.
\(V_V\) – Velocidade medida pelo sensor no eixo vertical.
A equação acima mostra que a \(V_R\) é sempre positiva. Além disso, você deve calcular a \(V_R\) para cada instante de medição. Para entender melhor isso é interessante compreender o significado de taxa de amostragem.
A taxa de amostragem diz quantas medições seu aparelho consegue efetuar em um segundo. Algumas normas de controle de vibrações discorrem sobre a mínima taxa de amostragem aceitável. A NBR 9653, por exemplo, diz que a taxa de amostragem deve ser de, no mínimo, 1000Hz por canal. Isso significa que em um intervalo de 1 segundo o aparelho deverá registrar 1000 medições para cada canal, ou seja, 1000 medições na transversal, 1000 na vertical, 1000 na longitudinal e 1000 no microfone. Isso significa que sua medição deve ter uma resolução mínima de 1ms. Desta forma, em um segundo você terá 1000 medições de velocidade resultante, uma a cada 1ms se sua taxa de amostragem for de 1000Hz.
Digamos que seu evento tenha 2 segundos de duração e que a sua taxa de amostragem seja de 1000Hz. Neste caso você terá 2000 medições de \(V_R\). O maior valor dentre as 2000 medições é o que se chama de velocidade resultante de pico de partícula. Essa \(V_{R_{pico}}\) é geralmente aquela que aparece no resumo gerado pelo software do fabricante do sismógrafo. Dê uma olhada na imagem abaixo de parte de um sismograma gerado pelo software da WhiteSeis.
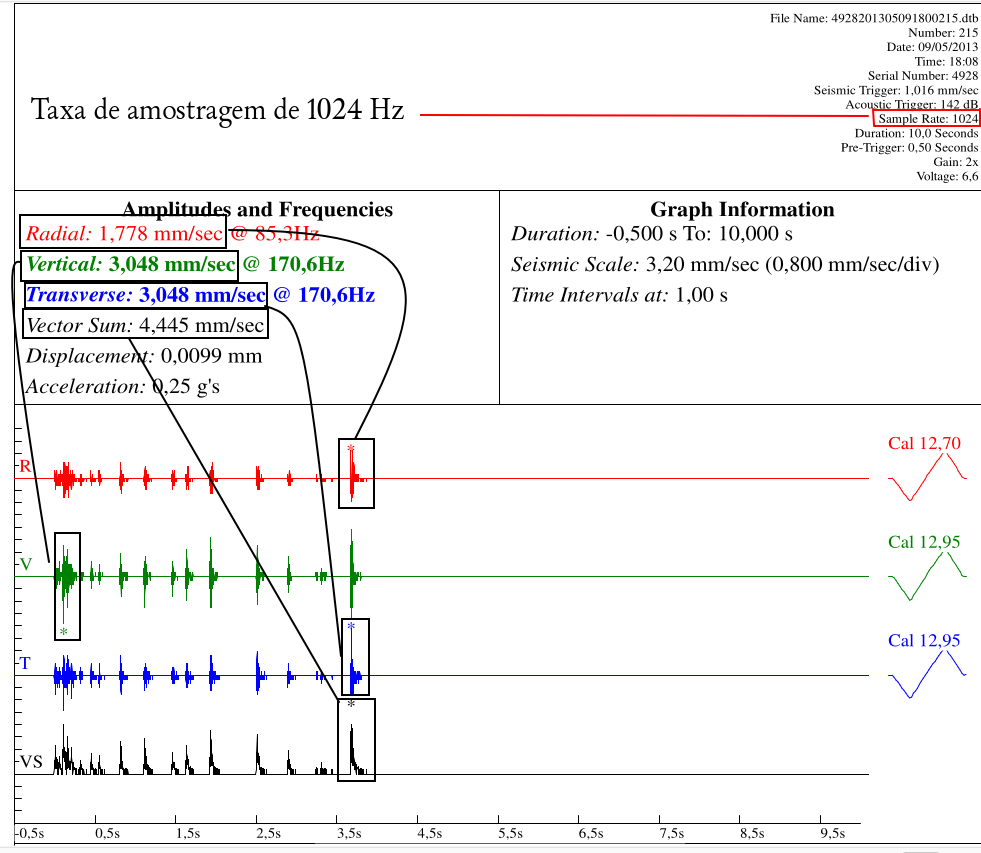
Nesta imagem destaquei os valores de pico das componentes que aparecem como um valor informativo no sismograma (o software marca no gráfico com um asterisco (*) onde estes valores ocorreram). Veja que elas não necessariamente ocorreram no mesmo instante. O maior valor da velocidade resultante, de 4,445mm/s, ocorreu próximo ao fim do evento, longe do pico da velocidade vertical. Neste sismograma, 1024 medições de velocidade resultante foram calculadas para cada segundo de gravação e o maior valor encontrado foi de 4,445mm/s. Veja na animação abaixo que vamos varrendo os valores de cada componente no mesmo intervalo de medição e aplicando a formula da \(V_R\). Com isto geramos o gráfico da resultante. Obviamente que na animação não estamos mostrando a varredura de absolutamente todos os valores, ela serve apenas como um recurso didático.
A figura abaixo mostra o exemplo de uma parte da tabela de dados que compõe um sismograma para os primeiros 30 millissegundos de um evento qualquer. Esta tabela mostra de uma maneira numérica informações dos gráficos da animação acima.
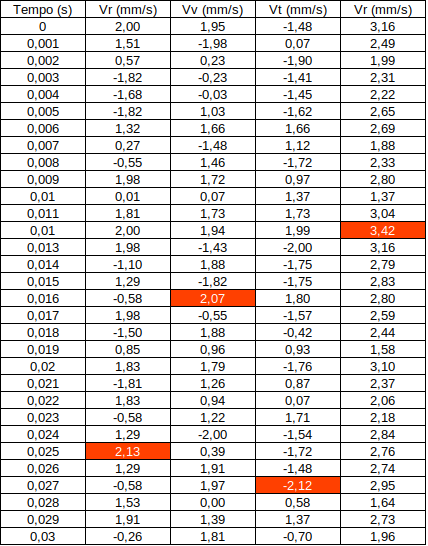
Note que os maiores valores em módulo das componentes não ocorreram no mesmo instante e o módulo da maior velocidade resultante nem mesmo possui os valores de pico das componentes individuais. Por isso cuidado quando você dá muita atenção aos valores de pico individualmente, eles podem não significar muita coisa. Antigamente existiam duas definições de velocidade resultante de pico, a PVS – Peak Vector Sum e a PVR – Peak Vector Real. A PVR na tabela acima seria o valor de 3,42mm/s destacado na coluna \(V_r\). O valor PVS seria a pseudo resultante dada pela soma vetorial dos valores de pico das componentes, mesmo que não ocorram no mesmo instante, i.e, \( PVS = \sqrt{(2,13)^2 + (- 2,12)^2 + (2,07)^2} \approx 3,65mm/s \). Não sei se ainda hoje existe alguma aplicação ou norma que use a PVS. Neste texto, quando falarmos em velocidade resultante estaremos sempre nos referindo a PVR.
E a frequência não é importante?
Sim, a frequência é importante para algumas situações. As estruturas respondem de maneira diferente a vibrações iguais em todas as suas variáveis menos na frequência. Isto quer dizerm que se geramos duas vibrações exatamente iguais em velocidade, aceleração e amplitude mas com frequências diferentes, uma mesma estrutura vai responder a esta solicitação de maneira distinta. Isso pode ser bem compreendido neste excelente livro escrito por um dos caras que ajudou a escrever o USBM RI8507 que deu origem as mais diversas normas de controle de vibração no mundo: Blast Vibration Monitoring and Control – Charles H. Dowding
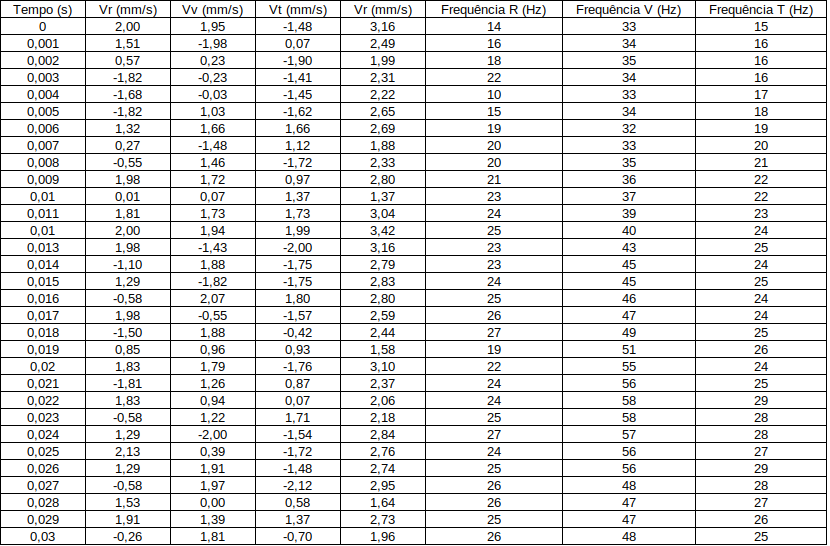
Existem algumas maneiras de se extrair as frequências de cada ponto de medição de velocidade. As mais simples e fáceis são as que usam métodos de zero-crossing. Basicamente, calculamos quando o sinal cruza a linha temporal e com isso determinamos seu período localmente. Mas eu não quero me estender neste assunto. Em outros textos vamos explorar as ferramentas de análise espectral, como as técnicas de zero-crossing, transformadas de Fourier e transformada de ondeletas. Mas saiba você que seu sismógrafo lhe fornece as frequências. Eu tenho quase certeza que todos os fabricantes disponibilizam a exportação dos dados em formato .csv ou outro formato de texto qualquer. Algo como uma tabela mais ou menos deste jeito:
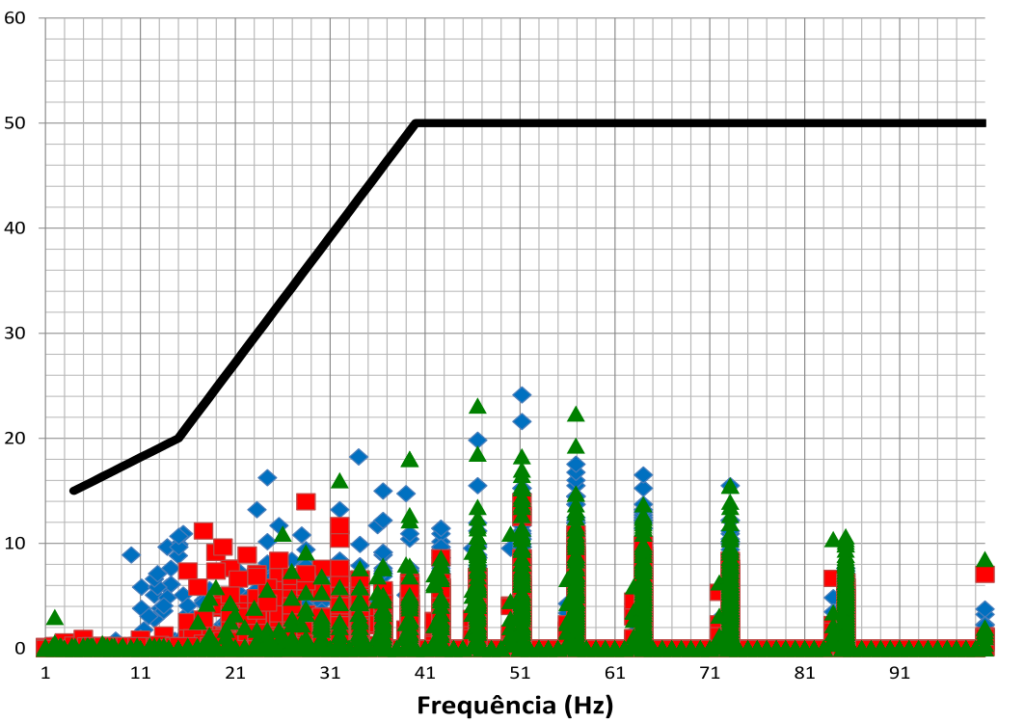
Existem diversas normativas que impõem a frequência como fator limitante. A NBR 9653 é uma destas normas. E isto causa alguma confusão. Muita gente usa apenas os valores de pico de cada componente e sua frequência associada. Mas, na verdade, você precisa usar todos os valores de medição de cada componente e suas respectivas frequências. Usar apenas os valores de pico torna completamente inútil a abordagem do uso das frequências. Veja, você pode ter valores de pico com frequências que estejam dentro dos limites e outros valores, que não os de pico, que estejam fora. Utilizar as frequências como limitadores de velocidade de partícula implica em repartir a responsabilidade do potencial de dano entre os valores de velocidade e de frequência. Ou seja, você pode ter medições de velocidades de partícula menores que os valores de pico mas com frequências associadas que os deixam fora dos limite da norma e valores de pico com frequências associadas que os deixam dentro dos limites da norma. Se você usa apenas os valores de pico ignora todo o restante do espectro que pode ser danoso. Cuidado com isso. Por exemplo, veja a figura abaixo onde todos os valores das componentes medidos pelo sismógrafo estão plotados em função das suas respectivas frequências associadas. As linhas em preto mostram os limites de vibração em função da frequência ditados pela NBR 9653.
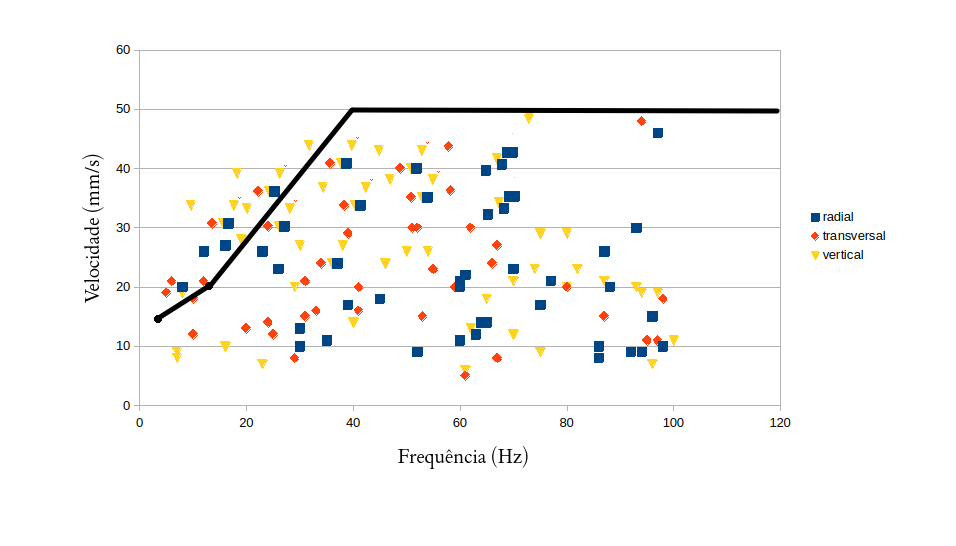
Se você utilizar apenas os valores de pico, sumariamente vai ignorar àqueles que não atendem a norma e que possuem um potencial de dano maior (justamente por isso estão fora da norma!). Veja a figura abaixo.
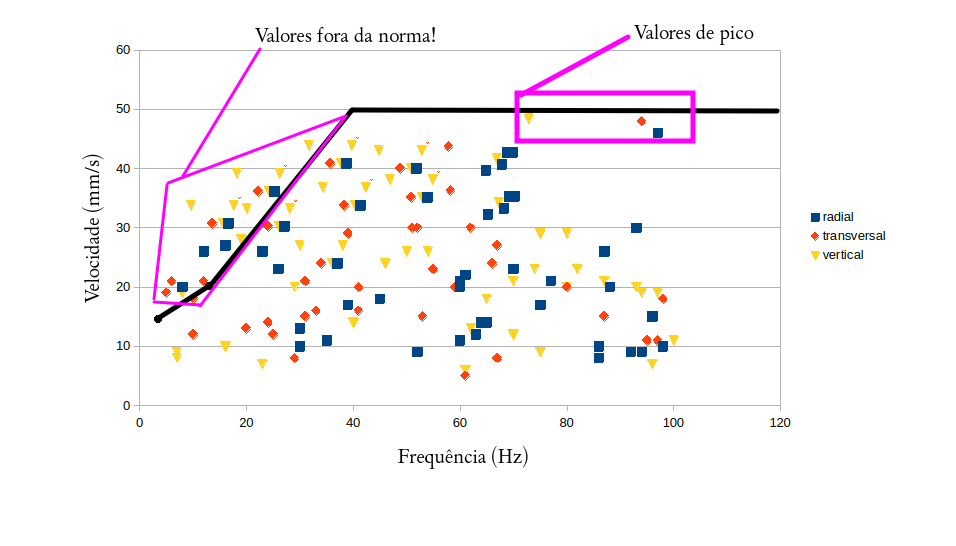
Quando o pessoal estudou o assunto e resolveu estabelecer as frequências como um fator limitante, foi para que pudéssemos verificar se todo o espectro de vibração ou apenas alguma parte dele poderia causar dano. Utilizar somente os valores de pico pode ser perigoso. Você pode estar ignorando valores de velocidade associados a frequências que tem potencial de dano maior. Cuidado.
Mas isto assunto é para outro texto. Estamos interessados aqui em como podemos estimar o valor máximo da coluna da velocidade resultante ou de qualquer outra das componentes. Este valor máximo é utilizado em alguns limites legais no Brasil. Por exemplo, a Norma Reguladora de Mineração 16 – NRM16, no seu paragrafo 16.4.14 diz que a máxima velocidade da componente vertical deve ser de 15mm/s.
Já a norma técnica da CETESBE D7.13 estabelece o limite de 4,2mm/s na velocidade resultante.
Você também pode estar querendo simular os possíveis valores de velocidade, seja nas componentes ou na resultante, ou em ambas, para estimar o intervalo provável de tensões que uma estrutura ficará exposta, como eu fiz neste desmonte para preservar as partes da barragem que não seriam implodidas:
Se numerarmos as colunas da tabela dos dados medidos pelo sismógrafo, conforme a figura abaixo:
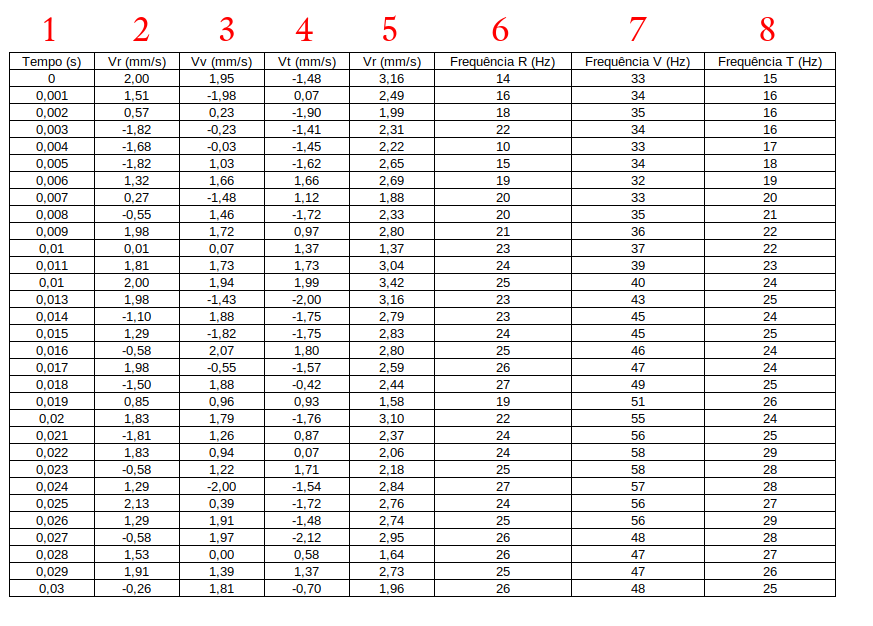
Teremos que analisar as seguintes colunas em função do que queremos:
- NBR 9653 – Colunas 2,3,4,6,7,8.
- CETESBE D7.13 – Coluna 5.
- NRM 16 – Coluna 3.
- Estimar campo de tensões – Colunas 2,3,4,5.
Neste artigo, vamos explorar como estimamos a máxima velocidade de partícula, isto é, o maior valor de cada uma das colunas de 2 a 5. Deixaremos a análise espectral, quando incluiremos as frequências, para outro texto.
Distância escalonada.
Você certamente já ouviu falar em distância escalonada. Sua origem vem da análise dimensional. Particularmente do Teorema π de Vaschy-Buckingham. De uma maneira bem resumida, você pode usar este teorema para tentar deduzir relações fundamentais entre as variáveis de um problema. Pode-se fazer isso utilizando as dimensões físicas das variáveis envolvidas. É um assunto bastante interessante, porém se formos nos aprofundar nele, teríamos que desenvolver um parenteses muito longo por aqui. Contente-se em saber que as distâncias escalonadas (sim, existe mais do que uma) não surgiram do nada, nasceram da analise dimensional do problema relativo as vibrações ocasionadas por desmonte de rochas por explosivos. Se quiser se aprofundar no assunto, pesquise os trabalhos de Ambraseys e Hendron e de Devine na base da ISEE.
Existem duas formas de distância escalonada comumente usadas. Uma utiliza a raiz quadrada da carga explosiva, outra, a raiz cúbica. São elas:
\(
DE_2=\frac{D}{\sqrt{Q}}
\\
DE_3=\frac{D}{Q^{\frac{1}{3}}}
\)
Em ambas, \(D\) é a distância da carga explosiva ao ponto onde a velocidade de partícula será medida. \(Q\) é a massa de carga explosiva detonada no mesmo instante. Ainda não estamos falando em carga máxima por espera. Chegaremos nela mais adiante, por enquanto, Q é apenas a massa explosiva.
Existem diferenças no uso de uma ou outra distância escalonada. Para a previsão da frequência principal, a cúbica se comporta melhor. Para distâncias “grandes” do desmonte, tipo maiores que alguns metros, a distância escalonada quadrática tende a ser mais conservadora nas previsões de atenuação. Enquanto que para distâncias próximas, a cúbica tende a ser mais conservadora. Ambas estão ligadas diretamente ao decaimento das vibrações. De longe, a quadrática é a mais usada em modelos de previsões de vibrações. Utilizaremos ela nas definições a seguir. Sempre que falarmos, daqui por diante, em distância escalonada, estaremos nos referindo a distância escalonada quadrática:
\(
DE=\frac{D}{\sqrt{Q}}
\)
Se você detonar diversas configurações de distância escalonada e medir a velocidade de partícula gerada, verá que existe uma relação do tipo:
\(
V=K(DE)^{\alpha}
\)
Os coeficientes \(K\) e \(\alpha\) são determinados através das analises estatísticas que veremos adiante. Eles são característicos de cada local e de cada aplicação. Por exemplo, se você está desenvolvendo uma curva para prever a componente vertical apenas, os coeficientes que você encontrar não serão adequados para serem utilizados na previsão da velocidade resultante. Em situações de subsolo eu já tive que desenvolver curvas independentes para cada região do desmonte. Uma curva para o pilão, outra para um ou mais intervalos de tempo dos não elétricos e outra para o contorno. Isso se deve a alta dispersão dos tempos de não-elétricos para retardos muito longos, na casa dos segundos. Se você juntar todos no mesmo bolo a dispersão vai derrubar seu coeficiente de determinação, tornando a previsão de vibrações muito deficiente.
O coeficiente \( \alpha \) é negativo (se você fez tudo certo!). Este detalhe faz com que
\(
V=K\frac{Q^{\frac{\alpha}{2}}}{D^{\alpha}} ; \alpha > 0
\)
Fisicamente isto faz muito sentido. A velocidade de partícula é proporcional a uma potência da massa da carga explosiva e inversamente proporcional a uma potência da distância. Quanto mais explosivo, mais vibração; quanto mais distante, menos vibração. Mas veja que o potencial de vibração, no caso \(V\) na equação acima, é uma função não linear. Isso significa, dentre outras coisas, que os locais onde podemos esperar velocidades de partículas iguais não são linearmente dependentes da distância. A equação acima diz que a velocidade de partícula será maior quanto menor for a distância escalonada. Por exemplo, na figura abaixo temos três furos carregados com 2kg, 7kg e 9kg de explosivos a uma distância das casas de 6m, 9m e 12m respectivamente. Qual dos furos tem potencial de gerar maiores vibrações?
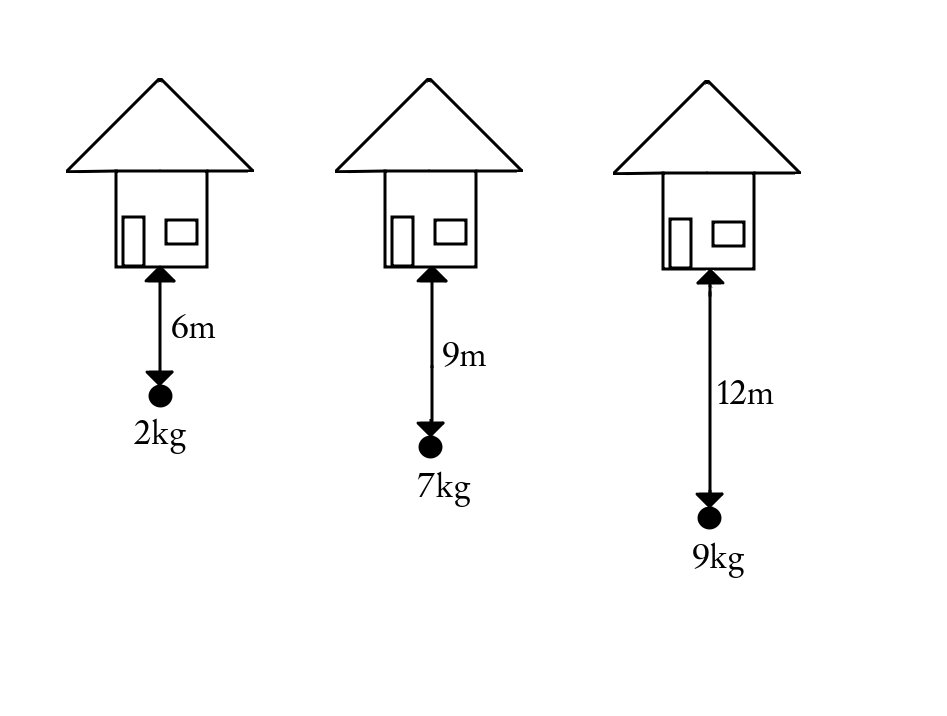
Para responder isso precisamos calcular a distância escalonada de cada furo. Vejamos:
\(
DE_{f1}=\frac{6}{\sqrt{2}}\approx 4,2 m.kg^{-\frac{1}{2}}
\\
DE_{f2}=\frac{9}{\sqrt{7}}\approx 3,4 m.kg^{-\frac{1}{2}}
\\
DE_{f3}=\frac{12}{\sqrt{9}}\approx 4,0 m.kg^{-\frac{1}{2}}
\)
O furo que possui o maior potencial de vibração é o furo que está a 9m de distância. Veja que não é o furo que está mais próximo, nem aquele que possui a maior carga, mas aquele que apresenta a menor distância escalonada.
Você já deve ter lido em algumas normas algo mais ou menos parecido com isso: “o sismógrafo deve ser instalado onde presumivelmente ocorrerão os maiores níveis de vibração…”. Este local onde se presumem as maiores velocidades de partícula é onde se encontra a menor distância escalonada.
Ela também pode servir como uma guia para o dimensionamento de cargas explosivas sem que saibamos nada a respeito dos coeficientes \( \alpha \) e \(K\). Por exemplo, na NBR 9653, lá no último item 6.2 consta o seguinte:
Quando, por motivos excepcionais, houver o impedimento da realização do monitoramento sismográfico, pode ser considerada atendida esta norma com relação ao item 4.3, se for obedecida uma distância escalonada que cumpra com as seguintes exigências:
\(DE \geq 40 m/kg^{0,5}\)
para \(D \leq 300m\)
Fonte: ABNT NBR 9653
O que isso significa? Um exemplo para ilustrar. Digamos que haja uma construção qualquer a 50m do local onde você precisa realizar o desmonte de um único furo (por enquanto vamos nos ater a situação mais simples possível). Não existe ou não há possibilidade da instalação de um sismógrafo. Para você atender a NBR 9653 no quesito vibrações de solo (o ruído não está incluso neste pacote de excepcionalidade) você deve utilizar uma carga explosiva que conduza a uma distância escalonada maior ou igual a \(40 m/kg^{0,5}\). Senão vejamos:
\(
DE \geq \frac{D}{\sqrt{Q}}
\\
40 \geq \frac{50}{\sqrt{Q}}
\\
\sqrt{Q} \leq \frac{50}{40}
\\
Q \leq \bigr(\frac{50}{40}\bigl)^2
\\
Q \leq 1,12kg
\)
Sim, eu sei, 1,12 quilogramas para 50m de distância é uma carga explosiva muito pequena, mas é o preço a se pagar para não utilizar monitoramento sismográfico. E porque este item limita distâncias menores que 300m? Devido a frequência das oscilações. Baixas frequências tendem a possuírem uma atenuação muito menor com a distância, por isso, a distâncias grandes do desmonte existe uma concentração muito maior de baixas frequências no espectro, que são as que causam mais preocupação. Por isso nestas situações a abordagem mais segura é o monitoramento sismográfico.
Até agora tratamos a aplicação da distância escalonada a uma única carga explosiva. Mas um desmonte raramente é composto de apenas um furo. Como procedemos quando estamos detonando com mais de um furo com cargas explosivas distintas? A resposta é: depende da situação. Observe o gráfico representado na figura abaixo.
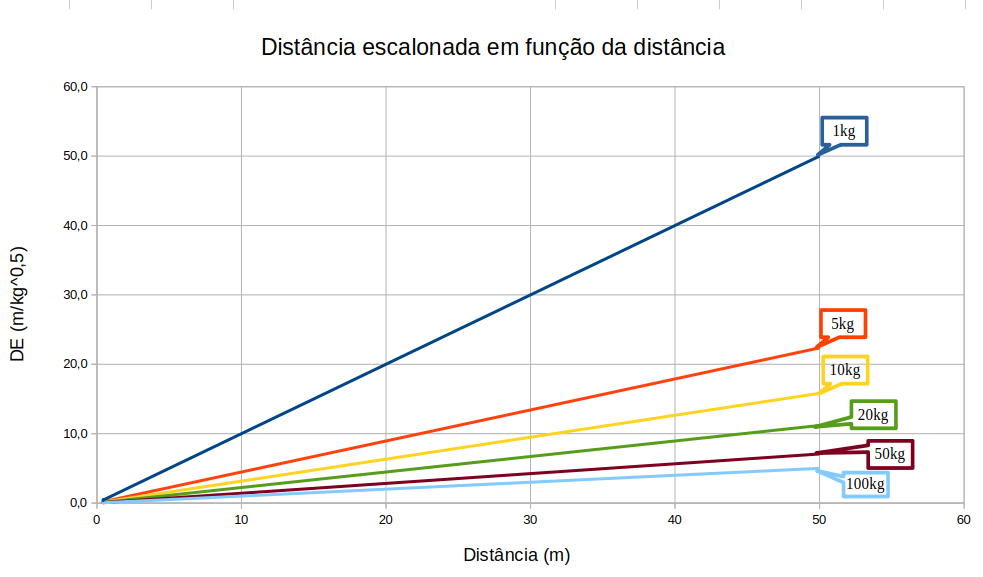
Neste gráfico temos diversas curvas de distância escalonada plotadas para cargas explosivas mantidas constantes. Perceba que para grandes distâncias o fator que mais contribui para diferenciar as curvas é a carga explosiva. Já quando estamos muito próximos ao desmonte, a distância à carga explosiva oferece uma contribuição maior e as curvas ficam mais próximas. Se analisarmos a equação de \(DE\), podemos observar isso:
\(
DE = \frac{D}{Q^{\frac{1}{2}}}
\\
\\
\Bigl(\frac{\partial DE}{\partial D}\Bigr)_Q = \frac{1}{Q^{\frac{1}{2}}}
\\
\\
\Bigl(\frac{\partial DE}{\partial Q}\Bigr)_D = -\frac{D}{2Q^{\frac{3}{2}}}
\)
As derivadas parciais acima dizem que a distância escalonada “sente” mais variações devido a distância quando ela é pequena, ou seja, quando estamos próximos a fonte. Por outro lado, quando nos afastamos da fonte, a carga explosiva começa a fazer a maior diferença. Considere os furos de um desmonte carregados com cargas explosivas dentro de um intervalo de 10kg a 15kg. Para uma distância de 5m, a distância escalonada fica entre os valores de
\(
1,29 \leq DE \leq 1,56
\)
E para uma distância de 100m teremos:
\(
25,8 \leq DE \leq 31,6
\)
Se você está a uma distância “longa” do desmonte, pode considerar a carga explosiva como sendo aquela que é a maior soma das cargas explosivas que detonam no mesmo instante, a chamada Carga Máxima por Espera – CME, pois as pequenas variações das distâncias entre os furos não provoca tanta diferença no valor da distância escalonada. Agora, se você está “muito próximo”, então pequenas variações da distância podem gerar mudanças maiores na distância escalonada. Talvez seja necessário considerar a carga individual de cada furo, principalmente se você estiver detonando furo-a-furo. Utilizar a CME em desmontes muito próximos, ignorando as contribuições individuais de cada furo, pode ser uma estratégia perigosa.
No desmonte do vídeo abaixo, eu não usei a CME como fator de previsão de vibração, mas observei a contribuição individual da carga explosiva de cada furo, principalmente nas regiões mais próximas das estruturas.
Neste outro, além da previsão de velocidade de partícula aliada ao campo de tensões induzido, também utilizei um modelo para a previsão das frequências principais, pois haviam equipamentos sensíveis dentro da fábrica que eram particularmente afetados por determinada faixa de frequência.
Ainda não falamos dos níveis de vibração, estamos tratando do assunto de uma maneira qualitativa. Isto é o que a distância escalonada te fornece a priroi, uma analise geral. Para encontrarmos valores prováveis de velocidade de partícula, precisamos determinar os coeficientes \(\alpha\) e \(K\) presentes na equação
\(
V = K(DE)^{\alpha}
\)
Estes coeficientes não possuem valores tabelados. Conforme disse acima, eles dependem das condições locais. Você pode encontrar na literatura valores prontos, alguns bem famosos, como os de Langfors, Devine, USBM e muitos outros. Utiliza-los ou não depende de cada caso. Em uma situação onde seus desmontes estarão longe do ponto de medição até pode ser uma boa estratégia utiliza-los como uma primeira aproximação, mas se você está muito próximo, talvez seja melhor utilizar um método mais analítico que gere uma confiança maior. Vejamos como se faz isso.
Linearização e mínimos quadrados.
O desenvolvimento a seguir é um clássico presente nos laboratórios e nas pesquisas de campo.
Eu me lembro das experiências dos laboratórios de física da faculdade. Uma das primeiras técnicas que nos foi ensinada foi a linearização de dados. Linearizar significa transformar uma equação que não é uma reta em, adivinhe, uma reta! Quando já conhecemos a equação que governa o fenômeno que estamos observando fica mais fácil a linearização. No nosso caso temos uma equação que contem uma variável (DE) elevada a alguma potencia e aplicar uma transformação logarítmica pode ser a melhor estratégia de linearização.
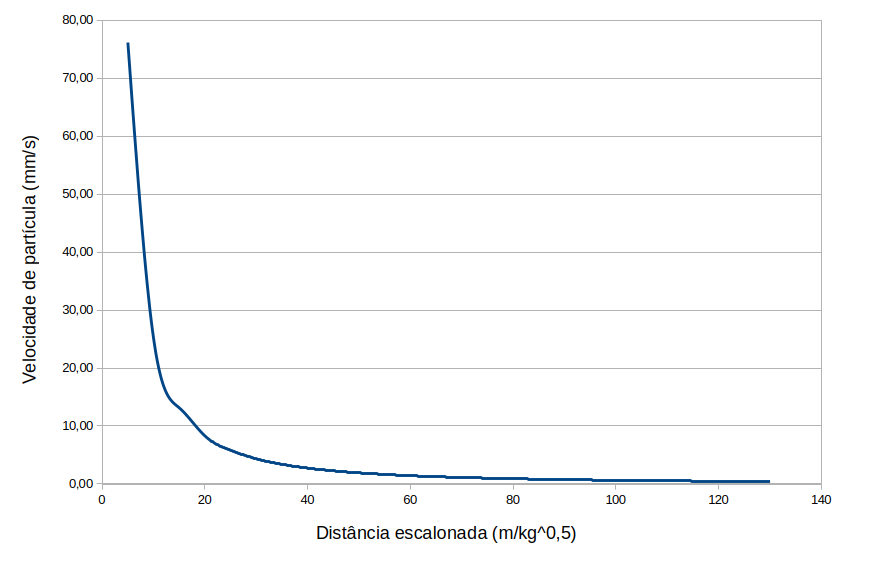
Para ilustrar o que queremos dizer com transformação logarítmica observe o gráfico abaixo onde plotamos diretamente os valores retornados por \(V = K(DE)^{\alpha}\) com \( K=1000 \) e \( \alpha = -1,6 \)
Agora, veja o que acontece se tomamos o logaritmo dos dois lados da equação.
\(
\log(V)=\log(KDE^{\alpha})
\\
\log(V)=\log(K) + \log(DE^{\alpha})
\\
\log(V)=\log(K) + \alpha \log(DE)
\)
Agora fazemos uma mudança de variáveis:
\(
\log(V)= Y
\\
\log(K)= \beta
\\
\log(DE) = X
\)
Substituindo:
\(
Y=\beta + \alpha X
\)
Esta ultima equação representa uma reta. O termo \(\beta\) é o que se chama de intercepto. Quando \(X=0\) então \(Y=\beta\). O termo \(\alpha\) é conhecido como coeficiente angular, representa a inclinação da reta em relação ao eixo \(X\).
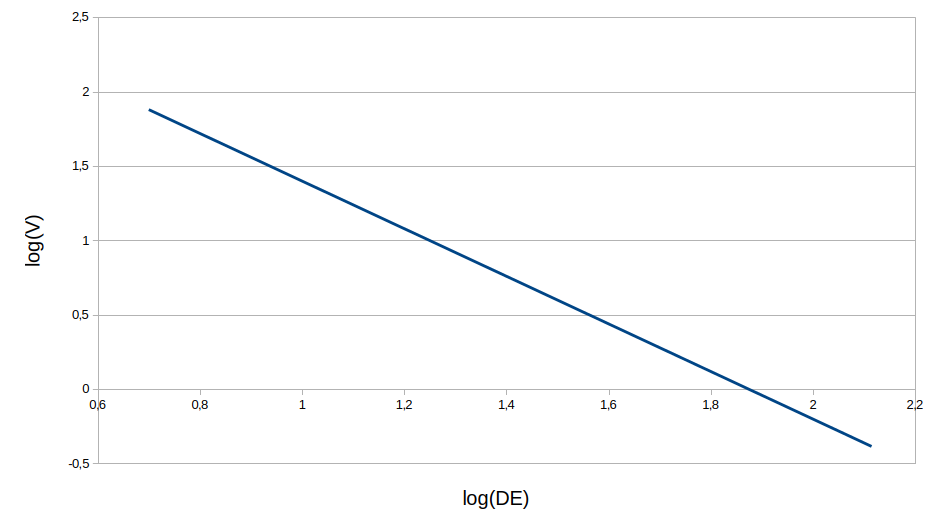
Veja a figura abaixo. Os dados são exatamente os mesmos, mas aplicamos a transformação logarítmica.
Com uma reta é muito mais fácil determinar os coeficientes \(\alpha\) e \(K\). Veja na figura abaixo o que estes dois coeficientes significam em uma abordagem geométrica.
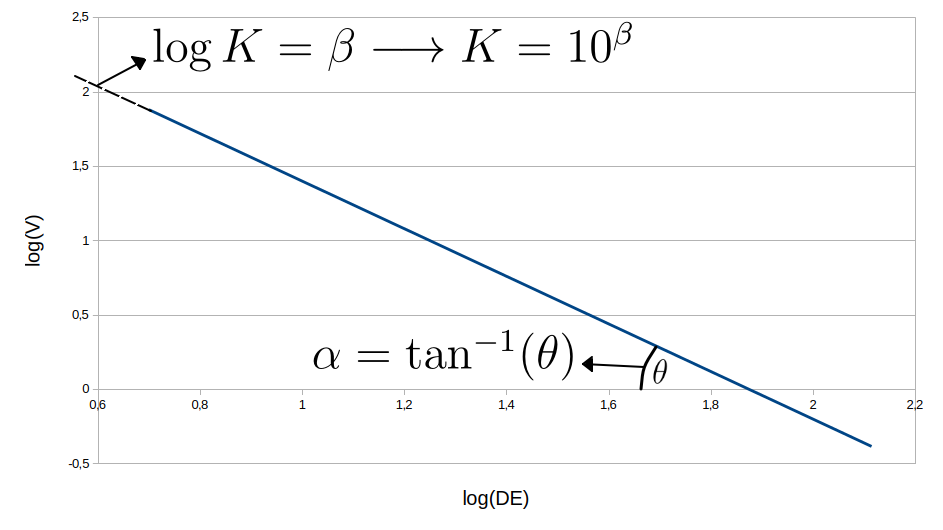
Basta encontrar o ponto onde a reta intercepta o eixo \(\log(V)\) que conseguimos calcular \(K\). Calculando o ângulo \(\theta\), encontramos o coeficiente \(\alpha\).
Quando começaram estes estudos para previsão de velocidade de partícula lá nos idos dos anos 1940, 1950 não havia computadores para auxiliar no processo. Por isso a linearização do gráfico ajudava muito. Você poderia encontrar \(K\) e \(\alpha\) com a ajuda de uma simples régua. Hoje em dia você não precisa fazer todo esse malabarismo de linearização. Podemos alimentar diretamente um modelo de best fitting de um SAC qualquer, como o GNU Ocatve, Mapple, Origin, Mathematica, Mathlab e até mesmo o Microsoft Excel, diretamente com a equação \(V = K(DE)^{\alpha}\) que o software calcula os coeficientes para você. Mas esta abordagem de linearização é um clássico e os clássicos devem ser sempre honrados, desta forma continuaremos com o método da transformada logarítmica. Mas se você quiser brincar com um SAC eu sugiro o GNU Octave. É livre, grátis, de código aberto e funciona em muitas plataformas. Apenas um detalhe para finalizar: nos gráficos acima usei logaritmos na base 10. Poderia ter usado qualquer base, inclusive \(e\). Os resultados seriam os mesmos.
Agora sabemos como linearizar os dados. Mas a notícia ruim é que, inevitavelmente, não importa o quão cuidadoso você seja na coleta dos dados, eles terão variações, imprecisões e erros associados. Para uma mesma medida de distância escalonada você terá diversas velocidades de partícula associadas. Olhe o exemplo da figura abaixo. Nela você pode ver medições de velocidade de partícula feitas para distâncias escalonadas de 5,10,15,20 e \(25m.kg^{-\frac{1}{2}}\).
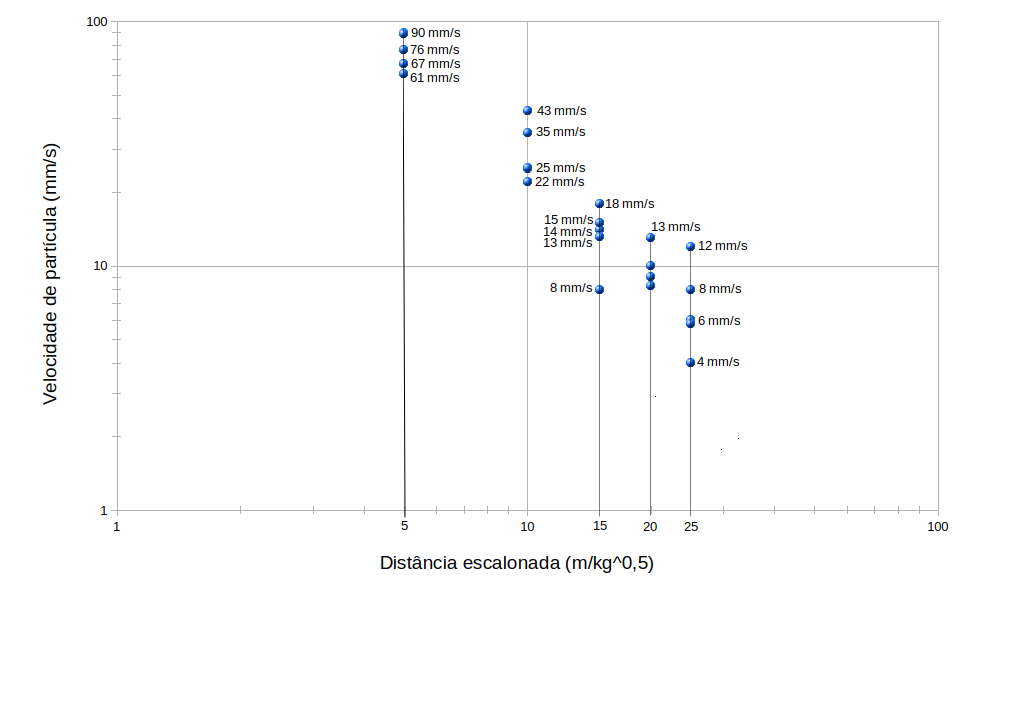
Estas variações são absolutamente normais. Chorar não vai fazer elas diminuírem. Existem inúmeras fontes de erros no modelo de previsão de vibrações, mas acredito que a anisotropia do meio e a maneira que se define a distância na equação \(V = K(DE)^{\alpha}\) são as principais. Não existe muito o que pode ser feito para a anisotropia. No máximo podemos tentar avaliar curvas específicas para determinadas direções ou locais em particular em vez de tentar usar uma espécie de “curva geral”. Já a distância presente na definição de distância escalonada pode ter diversos significados. Veja a figura abaixo, qual seria a distância que deveríamos considerar para calcular a distância escalonada?
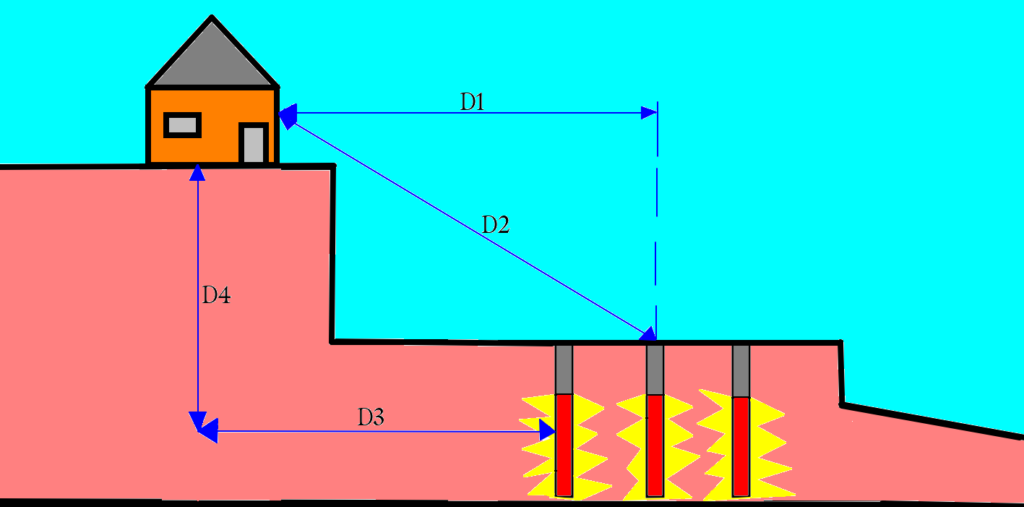
Não existe uma resposta correta. Mas você deve tentar manter um padrão para as medições. Se vai utilizar D1, por exemplo, deve manter a consistência em todas as medições. Pode ser que, para determinados locais ou situações, utilizar D2 seja mais vantajoso. Neste caso, você deve avaliar se manter os dados associados a D2 junto com os dados de D1 produz resultados aceitáveis ou então uma outra curva de previsão apenas com as distâncias D2 deve ser feita.
Ainda, as propagações ondulatórias em geral, não somente a luz, seguem o Princípio de Fermat. Isso significa que é muito difícil prever uma trajetória de onda direta entre a fonte e o geofone, pois o caminho pode não ser necessariamente uma linha reta. O Princípio de Fermat afirma que o caminho percorrido será aquele que consumir menos tempo. Mudanças de densidade do meio, por exemplo, podem levar a trajetórias diferentes de uma linha reta.
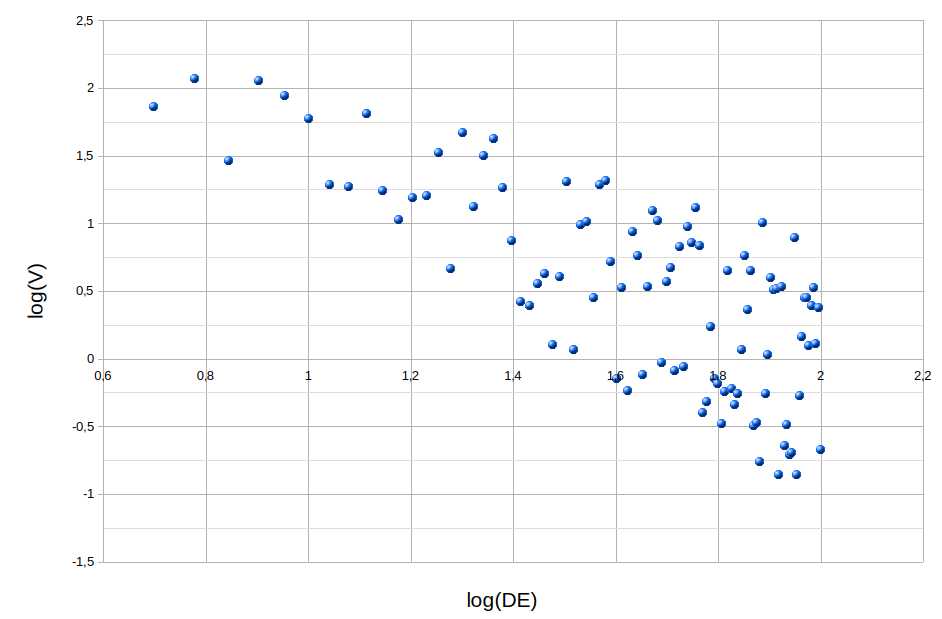
Todas estas fontes de incertezas e erros associados não geram exatamente uma reta com os dados de velocidade de partícula e distância escalonada, mas uma nuvem de pontos. Algo como mostrado na figura abaixo.
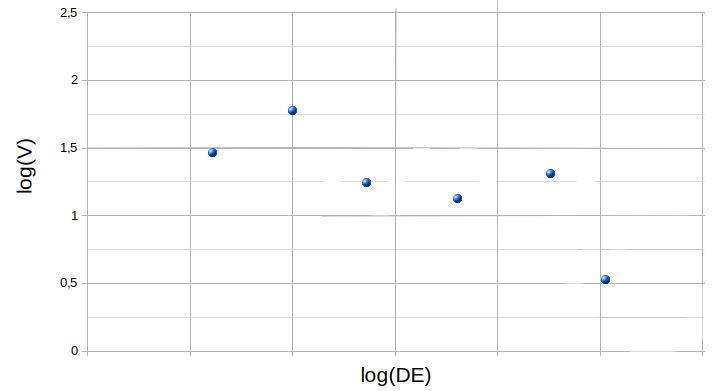
Para lidar com situações como esta, utilizamos o método dos mínimos quadrados. Este é mais um daqueles parenteses neste texto que daria só por ele mesmo um post dedicado, por isso vou tentar resumir o que é este método. Queremos encontrar uma reta para os pontos acima que melhor se ajuste aos dados. Mas como escolher entre infinitas possibilidades? Um jeito bacana de escolher esta melhor reta é dado pelo método dos mínimos quadrados. A título de simplicidade vamos usar de exemplo 6 pontos, conforme mostra a figura abaixo.
Vamos traçar uma reta qualquer e para cada ponto desenhamos um quadrado cujo lado é igual a distância do ponto até a reta. Veja a figura abaixo.
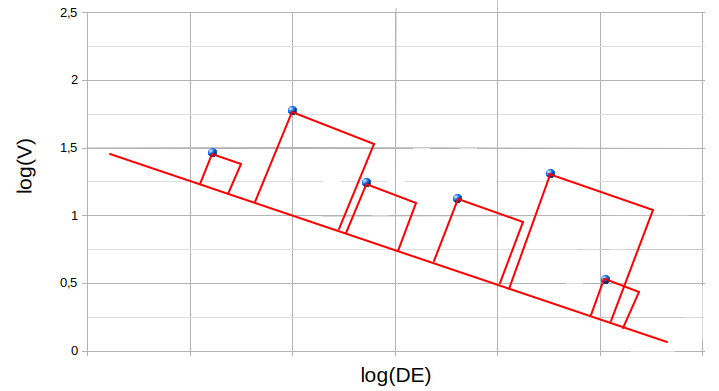
A reta que melhor se ajusta ao conjunto de pontos será aquela em que a soma das áreas dos quadradinhos for a menor possível, não concorda? Por isso se chama método dos mínimos quadrados. Veja na animação abaixo que vamos ajustando a inclinação e o deslocamento vertical até obter uma reta onde temos os menores quadradinhos possíveis, minimizando a soma das áreas.
Não vamos entrar em detalhes aqui de como o método dos mínimos quadrados encontra essa reta. O importante é que você entenda a ideia. Aplicando o método você terá uma reta com um coeficiente angular e um intercepto. O coeficiente angular será nosso coeficiente \(\alpha\) e o coeficiente \(K\) pode ser encontrado com o uso de \(K=10^\beta\) em que \(\beta\) é o intercepto.
Vou lhe mostrar um exemplo simples feito na planilha eletrônica. Você verá que não é tão difícil como está pensando que é.
Imagine que você captou 21 medidas de velocidade resultante, conforme a tabela abaixo.
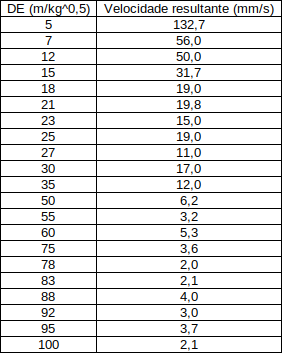
O que você precisa fazer agora é aplicar o logaritmo, pode ser na base 10, nas duas colunas. O resultado é uma tabela estendida como esta:
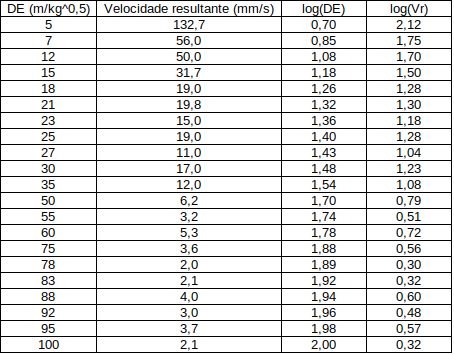
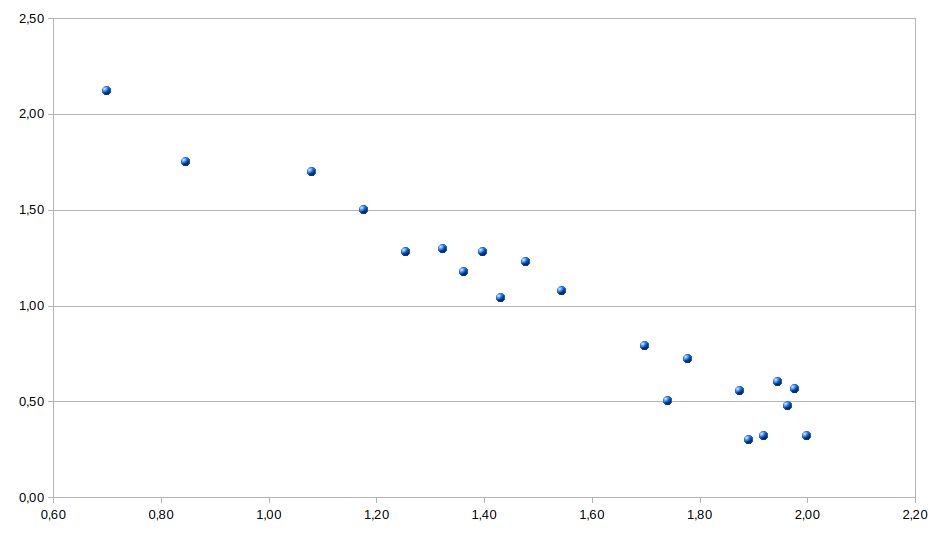
O gráfico após a linearização é mostrado abaixo.
Agora, vou te mostrar dois caminhos. Eles levam ao mesmo lugar. Escolha aquele que mais lhe agradar.
Na figura abaixo fiz uso das fórmulas de Excel:
INTERCEPÇÃO – calcula o intercepto com base em dados x,y da reta de melhor ajuste.
INCLINAÇÃO – calcula o coeficiente angular da reta de melhor ajuste de dados x,y.
RQUAD – calcula o coeficiente de determinação (já veremos mais adiante o significado deste número).
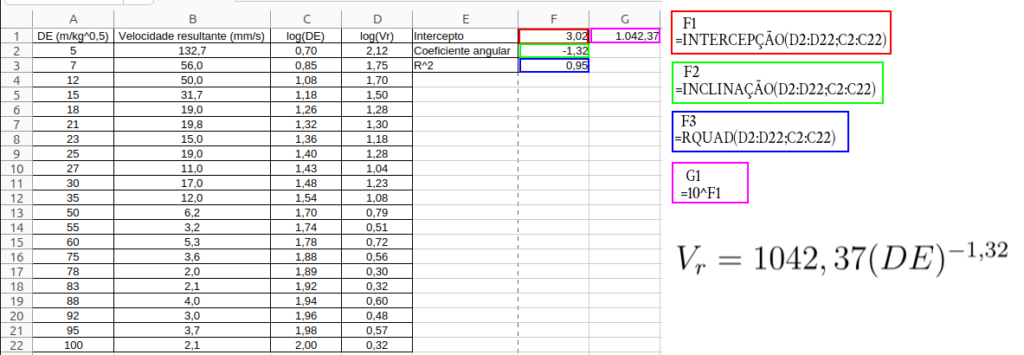
Com base nestes dados, nossa curva de melhor ajuste é
\(
V_r = 1042,37(DE)^{-1,32}
\)
Outro caminho é através do próprio gráfico com o uso das linhas de tendência. Basta selecionar os dados dentro do gráfico e aplicar uma linha de tendencia linear. Habilite as opções de exibição da equação e do valor do coeficiente de determinação \(R^2\).
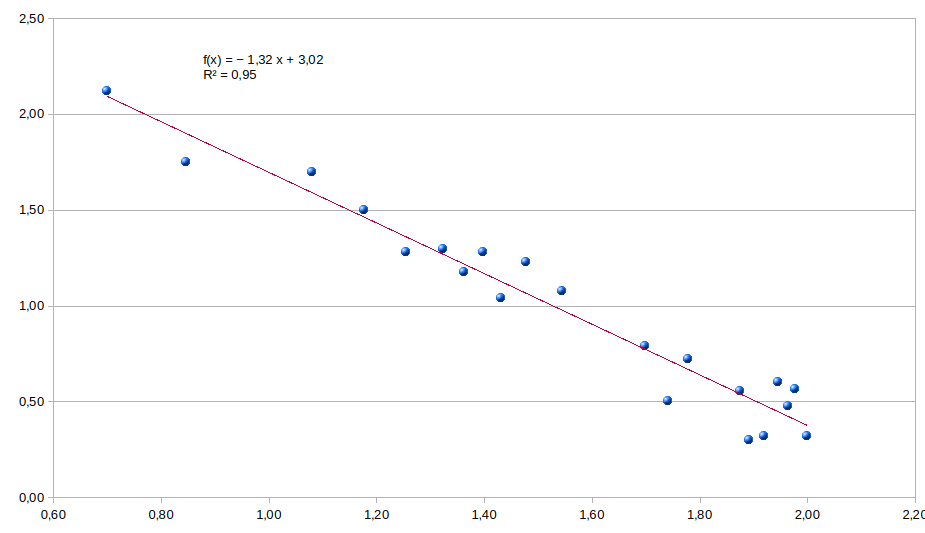
Veja que chegamos no mesmo lugar nos dois métodos.
O coeficiente de determinação \(R^2\) lhe diz como está a qualidade do seu modelo. Possui um valor que varia de 0 a 1. Quanto mais próximo de 1, melhor o ajuste da reta. No exemplo acima o valor de 0,95 diz que nosso modelo de certa forma “explica” 95% da variância da variável dependente, velocidade resultante, em função da variável independente, distância escalonada. Não é raro encontrar curvas de previsão de velocidade com valores de \(R^2\) muito baixos, menores que 0,5. Quanto menor for o valor de \(R^2\), pior será a previsão dada pela sua curva. Tenha sempre muito zelo e asseio na coleta dos seus dados de distância escalonada e carga explosiva para tentar manter o valor de \(R^2\) em níveis aceitáveis.
Esta curva que deduzimos acima é a que chamamos de curva do melhor ajuste da média. Se você observar na figura, verá que alguns pontos ficam acima da reta e outros, abaixo. Vamos analisar a previsão da nossa curva e comparar os resultados com os valores medidos. Veja a tabela abaixo.
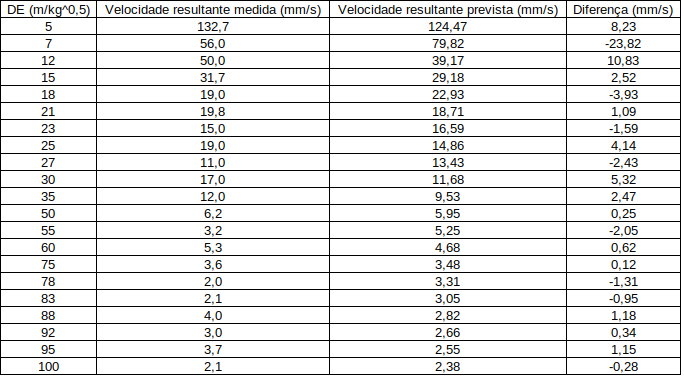
Alguns valores ficam acima, outros abaixo. Uns mais distantes, outros mais próximos. Na nossa aplicação de controle de vibrações, estas oscilações podem ser perigosas. Se nossa previsão de vibração gerar um valor muito abaixo do que for efetivamente medido então nosso esforço terá sido inútil. Melhor seria se pudéssemos garantir, pelo menos em algum nível de confiança, que as previsões do nosso modelo fossem regidas não por uma igualdade, mas por um desigualdade. Assim:
\(
V_r \leq K(DE)^{\alpha}
\)
A equação acima diz que o resultado, \(V_r\) será menor ou igual ao lado direito. Isso nos daria uma certa segurança. Para fazer isso, precisamos reconfigurar a reta de melhor ajuste da média de uma maneira que uma porcentagem dos pontos do gráfico fique abaixo dela. O intervalo de confiança mais comumente usado é de 95%. E por que não 100%? Se você definir um intervalo de confiança de 100%, ele precisa cobrir todos os possíveis valores, ou seja, incluir qualquer valor possível do parâmetro estimado. Isso não oferece insights úteis porque não restringe a incerteza de maneira prática. O intervalo de 95% é um padrão porque ele equilibra confiança e precisão. Ele significa que, se você repetisse a amostragem múltiplas vezes, 95% das curvas de ajuste geradas conteriam o valor real do parâmetro. 100% incluiria tudo e não teria valor preditivo, enquanto 95% equilibra confiança e precisão.
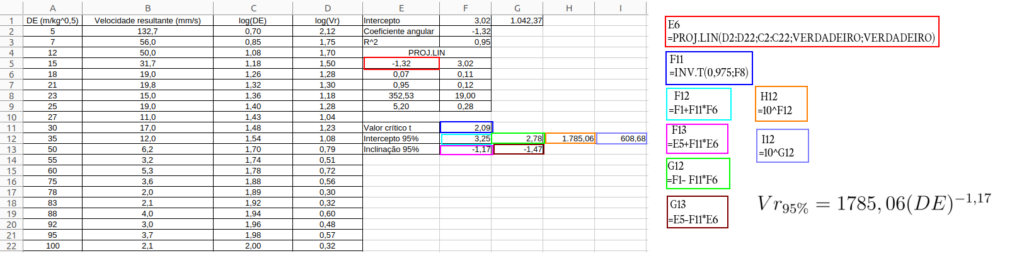
Definir uma curva de 95% de confiança no Excel é um pouquinho chato, mas dá pra ser feito. A melhor estratégia é utilizar a função PROJ.LIN que retorna uma matriz com os parâmetros que precisamos. PROJ.LIN retorna 5 linhas com as seguintes informações:
Linha 1: Inclinação da reta de melhor ajuste da média \(\alpha\) e Intercepto \( \beta\).
Linha 2: Erro padrão da inclinação, \(er_i\) e erro padrão do intercepto, \(er_t\). Necessários para o calculo dos parâmetros da curva de 95%.
Linha 3: Coeficiente de determinação \( R^2\) e erro padrão da variável Y.
Linha 4: Estatística F e número de graus de liberdade.
Linha 5: A soma dos quadrados da regressão e soma dos quadrados residuais.
Agora, utilizamos a função INV.T para calcular o valor crítico t da distribuição de Student. Os novos coeficientes da curva serão:
\(
\alpha_{95} = \alpha \pm (t\, er_i)
\\
\beta_{95} = \beta \pm (t\,er_t)
\)
Veja a nova tabela abaixo.
Detalhes:
A função INV.T foi iniciada com o valor 0,975 (97,5%) porque consideramos 2,5% em cada lado da cauda da distribuição, totalizando 5% na soma das duas.
Calculamos nas linhas do intercepto e da inclinação os coeficientes tanto para uma confiança de 95% acima quanto abaixo. Assim, a reta
\(
Vr_{U95\%} = 1785,06(DE)^{-1,17}
\)
contém os valores abaixo dela. E a reta
\(
Vr_{B95\%} = 608,68(DE)^{-1,47}
\)
contem os valores acima dela. Vamos comparar os valores previstos pela reta de 95% com os valores medidos.
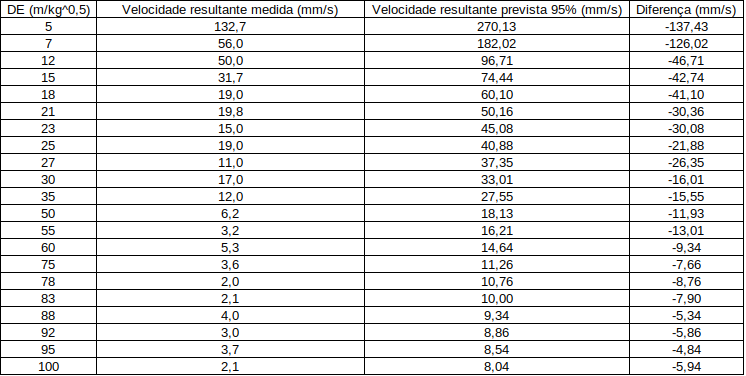
Agora nossas previsões estão com um coeficiente de segurança. Isso pode ser facilmente visualizado na plotagem das três retas que definimos. A da média, 95% inferiores e 95% superiores.
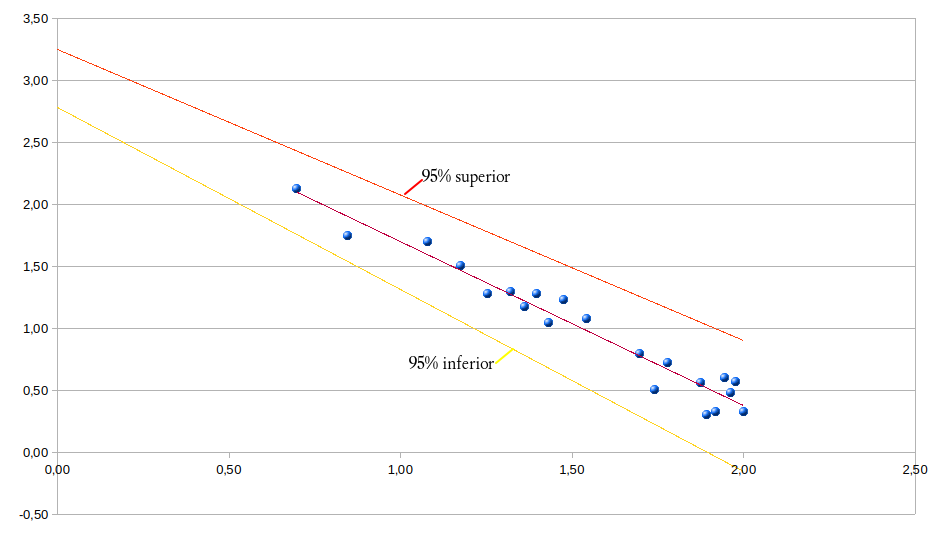
Todos estes cálculos podem ser feitos de maneira automática mesmo no Excel. No pacote de estatística você tem a opção direta de Regressão Linear. Os resultados já lhe trarão todos os interceptos e coeficientes de inclinação para as três retas. Mas é sempre bom entender o que significa cada termo, coeficiente e variável envolvida.
Este tipo de abordagem para determinar os coeficientes \(\alpha\) e \(K\) para uma curva de 95% é muito útil em situações de desmontes muito próximos a estruturas. Por exemplo, nos desmonte do vídeo abaixo, primeiro eu determinei os coeficientes iniciais \(\alpha\) e \(K\) através de 25 pontos de distância escalonada que detonei em um único fogo, isolando alguns furos com tempos de retardo grande entre eles de maneira a conseguir diferencia-los no sismograma. Com o uso de 5 sismógrafos a diversas distâncias, foi fácil gerar 25 valores de distância escalonada mesmo com cargas iniciais bem pequenas. Conforme os trabalhos avançavam, fui refinando o modelo.
E estes foram os valores medidos pelos sismógrafos:
Nestes outros desmontes abaixo, utilizei uma abordagem de busca com algoritmos genéticos para determinar as melhores configurações de malha e carga explosiva aliada a diversas possibilidades de coeficientes \(\alpha\) e \(K\). Com isso consegui prever a provavel faixa de valores das tensões que as estruturas ficariam expostas.
Existem ferramentas numéricas suficientemente precisas, confiáveis e de certa forma fáceis de serem usadas para que possamos manter as vibrações dos desmontes em níveis adequados. Não existem motivos para não usá-las. A segurança da operação começa no seu correto dimensionamento, na engenharia envolvida, mas o que ocorre frequentemente é uma certa abordagem um tanto quanto imprecisa, simplória e até mesmo, algumas vezes, amadora no projeto de desmontes de rocha em situações de controle crítico de vibrações.
Sem querer parecer o dono da palavra final no assunto, pelo contrário, gostaria muito de ouvir seus comentários e opiniões sobre o tema. Mande um email com críticas, sugestões ou mesmo se tiver alguma dúvida.
Minhas ultimas considerações sobre este tema, que descrevo abaixo, tem a intenção de levantar algum debate, ainda que singelo, sobre as práticas atuais de controle e medições de vibrações causadas por desmontes de rochas.
Já vi muitas licenças serem emitidas com a restrição de vibrações exclusivamente impostas por carga explosiva ou por altura de bancadas apenas. Conforme você pode ler no texto acima, a melhor maneira de restringir ou melhor dizendo, de impor certos limites regulatórios é através da distância escalonada.
Isso permite que o minerador ou quem quer que seja, tenha uma maior liberdade em trabalhar cargas, alturas e distâncias, facilitando a busca pela otimização da fragmentação. Quanto melhor a fragmentação menor serão as vibrações. Deixar uma certa liberdade guiada por uma restrição sensata de distâncias escalonadas parece ser a melhor alternativa.
Ao se adotar critérios de distancia escalonada e uma ou mais equação de previsão de vibrações consegue-se uma maior segurança nas operações. Em locais onde existe a convivência com vizinhos estas técnicas trazem muitas vantagens. Se você é responsável por um empreendimento nesta situação e não tem uma ou várias curvas de previsão prontas, está perdendo tempo e provavelmente dinheiro. Curvas de previsão de vibrações devidamente feitas e calibradas te permitem planejar com muito mais segurança a direção dos seus desmontes e as demais variáveis envolvidas:
– Os diâmetros de perfuração que podem ser usados sem que a carga explosiva extrapole as previsões do modelo.
– As alturas de corte em rocha que o modelo de vibração prevê como seguras, devido a carga explosiva que poderá usar.
– Os limites da sua lavra.
Além disso, você facilita a fiscalização do poder público. Tornando suas operações mais previsíveis e sem surpresas você certamente abrirá um diálogo muito mais sensato com seu agente fiscalizador, pois o estará subsidiando com dados que lhe permitirão tomar decisões com muito mais segurança.
Caso seu caso seja voltado à construção civil, como um projeto de desmonte urbano ou com severas restrições de vibração, meu conselho é que exija do seu fornecedor deste tipo de serviço um plano de gerenciamento das vibrações. Este plano deve incluir o modelo adotado para o inicio das operações, isto é, como se chegou a conclusão que as cargas explosivas dimensionadas gerarão vibrações em níveis seguros.
A estratégia de coleta dos dados para o refinamento do modelo inicial também deve estar presente.
Eu já vi muitos planos de fogo em que, no máximo, estava escrito que o controle de vibrações seria feito com a instalação de um sismógrafo. Ora, isso não é controlar nada, é apenas medir. Dizer que você vai controlar as vibrações apenas porque instalou um sismógrafo é dizer que seu médico vai lhe curar a febre apenas colocando o termômetro. O sismógrafo é apenas uma ferramenta para confirmar, ou não, as previsões do seu modelo de gerenciamento de vibrações.
Se for contratar consultores, cuidado com os capitães do óbvio. Um especialista deve lhe fornecer detalhes, números, ainda que no inicio estejam carregados com alguma incerteza incomoda.
Frases aleatórias como “devemos diminuir a carga”, “aumentar os retardos”, “o limite de vibrações seguro é de x mm/s” são muito vagas. Eles devem lhe fornecer a estratégia detalhada: qual a carga explosiva segura e por que, quais limites ou normas devem ou podem ser adotados e por que.
Quanto as normas que ditam limites certamente podem ser aprimoradas. Acredito que levantando o nível técnico sobre o assunto teremos condição de debater de uma maneira mais técnica sobre os limites que usamos e de como poderemos melhorá-los.
O texto acima contem a ponta do iceberg. É uma primeira aproximação para que você possa seguir para um caminho mais profundo e estudar em detalhes todas as técnicas e métodos apresentados.
Espero que lhe ajude de alguma forma!
Atualização:
Conforme apontado pelo meu amigo Eng. Luiz Eduardo da Technoblast atualmente os geofones trabalham com LVTs – Linear Velocity Transducers e não com acelerômetros. Fiz essa correção no texto onde eu afirmava, erroneamente, que a maioria utilizava acelerômetros. Já foi esse o tempo.
Obrigado Luiz!